Projects
Publications
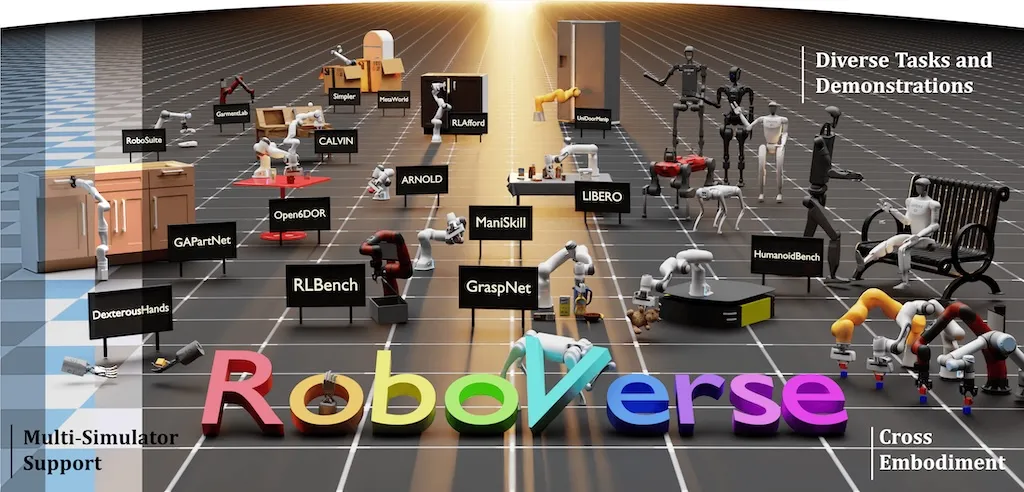
RoboVerse is a unified simulation platform for robot learning that integrates multiple simulators, provides high-quality synthetic datasets, and establishes standardized benchmarks. The platform features MetaSim - a universal interface that abstracts different simulation environments, enabling seamless transitions between simulators. It includes photorealistic datasets with high-fidelity physics and comprehensive benchmarks for imitation learning and reinforcement learning across various generalization levels.
Robotics: Science and Systems (RSS) • 2025
Fenghao Dong, Yutong Liang*, Yang He*, Zirui Liu, Yuhan Wu, Peiqing Chen, and Tong Yang
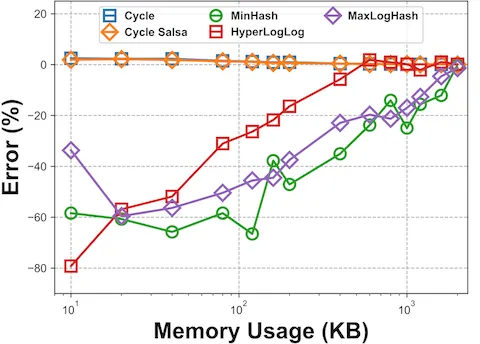
SimiSketch is a fast sketching algorithm for estimating similarity between sets. It achieves up to 42 times better accuracy and 360 times higher throughput compared to existing methods, making it suitable for large-scale applications like network traffic analysis and text processing.
arXiv preprint 2405.19711 • 2024
Research Projects
Personal Interest




