About
Yutong Liang

Guess what? Click the image to change it!
Hi there! 👋 I'm Yutong Liang, a 4th-year undergraduate student at the School of EECS , Peking University, majoring in Computer Science.
I have a vision of creating generalist agents that can do what we humans can do. I'm particularly interested in endowing them with human-level dexterity to master contact-rich human-object interaction (HOI) and in-hand manipulation tasks.
I explored these interests in character animation as a research student in the VCL Lab at Peking University from Fall 2023 to Summer 2025, where I was advised by Prof. Libin Liu.
I served as a Teaching Assistant for the Introduction to AI course at Peking University in Spring 2025.
During summer 2024, I was a research intern at Stanford University, where I worked with Michelle Guo and Pei Xu in the TML Lab and SVL Lab, under the guidance of Prof. Karen Liu and Prof. Jiajun Wu.
Previously, I researched in the field of Data Structures in Network Measurement in Spring 2023, supervised by Prof. Tong Yang.
Selected Projects
For more projects, please visit this page !
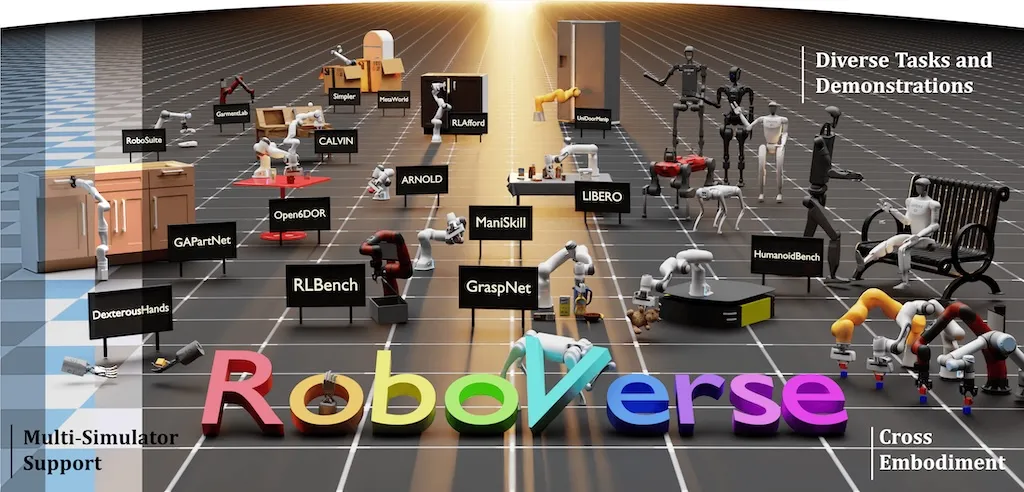
RoboVerse is a unified simulation platform for robot learning that integrates multiple simulators, provides high-quality synthetic datasets, and establishes standardized benchmarks. The platform features MetaSim - a universal interface that abstracts different simulation environments, enabling seamless transitions between simulators. It includes photorealistic datasets with high-fidelity physics and comprehensive benchmarks for imitation learning and reinforcement learning across various generalization levels.
Robotics: Science and Systems (RSS) • 2025
Fenghao Dong, Yutong Liang*, Yang He*, Zirui Liu, Yuhan Wu, Peiqing Chen, and Tong Yang
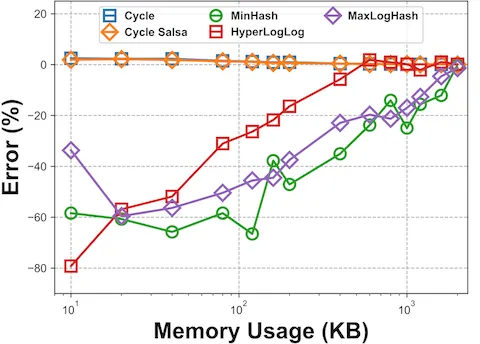
SimiSketch is a fast sketching algorithm for estimating similarity between sets. It achieves up to 42 times better accuracy and 360 times higher throughput compared to existing methods, making it suitable for large-scale applications like network traffic analysis and text processing.
arXiv preprint 2405.19711 • 2024

Education
- Sep 2021 - Jul 2025
- Sep 2018 - Jul 2021
Awards
- Sep 25, 2024
- Sep 21, 2024
- Sep 22, 2023
- Sep 22, 2023
- Sep 22, 2022
- Dec 25, 2021
Skills and Tools
Personal Interests
I am an avid speedcuber and currently hold the Peking University record for Pyraminx single (valid through June 2025).
Personal bests: 3×3 in 9.47s (Los Angeles 2024) and Pyraminx in 2.36s (Sacramento 2024). More on my WCA profile.
New to speedcubing? A concise intro video is here. I also write occasional posts on this topic.
I enjoy recreational tennis and play regularly for fitness and fun.